Dijkstra's Algorithm in C
Introduction
Dijkstra's algorithm is a popular algorithm used to find the shortest path between two nodes in a graph. The algorithm was developed by Dutch computer scientist Edsger W. Dijkstra in 1956 and is widely used in various applications, including routing in computer networks, GPS navigation systems, and optimization problems in engineering and science. The algorithm keeps a set of visited and unvisited nodes, iteratively selects the node with the smallest initial distance, and adds it to the visited set. The initial distance is the shortest distance from the initial node to the current node and is updated every time a shorter path is found. The algorithm terminates when the target node is added to the visited set or when no more unvisited node exists. If there are no negative edge weights, Dijkstra's algorithm is guaranteed to find the shortest path between two nodes in the graph. If the edge weights are negative, the algorithm may not work correctly, and other algorithms, such as the Bellman-Ford algorithm or the Floyd-Warshall algorithm, may be more suitable. In conclusion, Dijkstra's algorithm is efficient and widely used for finding the shortest path in a graph. Its simplicity and efficiency make it popular among developers and has many practical applications in various fields.
How Dijkstra's algorithm works?
Dijkstra's algorithm is famous for finding the shortest path between nodes in a graph. The algorithm starts from a specified "source" node and iteratively explores the graph to find the shortest path to each node. Here are the steps in Dijkstra's algorithm:
- Reset all nodes as unvisited and set the distance to the origin node to zero.
- For the current node, find all its unvisited neighbors. For each neighbor node, calculate the distance from the source node to that node using the current node.
- If the calculated distance is less than the neighboring node's current distance, update the neighboring node's distance to the calculated distance.
- Mark the current node as visited and select the unvisited node with the smallest distance as the next current node. Repeat steps 2-4 until all nodes are used.
Once the algorithm is complete, the shortest path from the source node to any other node in the graph can be obtained by following the sequence of nodes with the smallest distance.
History of the Dijkstra Algorithm
Dijkstra's algorithm was developed by Edsger W. Dijkstra in 1956 to solve the single source shortest path problem in a graph. At the time, he was a young computer scientist working at the Mathematical Center in Amsterdam, the Netherlands. The original motive for developing the algorithm was to solve a problem in the design of electronic circuits. Dijkstra wanted to find the shortest path between two points on a circuit and realized that the problem could be represented as a graph. He then developed an algorithm to solve this problem. The first version of Dijkstra's algorithm was published in 1959 in A Note on Two Problems in Graphs. This paper presented a basic algorithm for finding the shortest path in a graph and introduced the "priority queue" concept to select the next visiting node efficiently. Since its introduction, Dijkstra's algorithm has become one of computer science's most widely used algorithms. It has many applications in transport networks, communication networks, and computer networks. The algorithm has also been modified and adapted for use in different contexts, such as negative edge weights and additional graphical constraints.
Pseudocode of Dijkstra's algorithm
1. Create a priority queue and initialize it with the source vertex and a distance of 0.
2. Create a distance array and initialize all values to infinity except the source vertex, which is set to 0.
3. Create a boolean array to track visited vertices and initialize all values to False.
4. While the priority queue is not empty:
a. Pop the vertex with the smallest distance from the priority queue.
b. If the vertex has already been visited, skip it.
c. Mark the vertex as visited.
d. Iterate over its adjacent vertices and update their distances if necessary.
e. If the destination vertex has been visited, stop the algorithm and return the shortest distance.
5. If the destination vertex has not been visited, there is no path from the source vertex to the destination vertex.
Note:
In step 1, the priority order should be initialized using a tuple containing the distance and the vertex and sorted by the distance in ascending order. In step 4d, the
distance to each adjacent vertex should be calculated as the sum of the current
vertex distance and the edge weight between them.
C program for Dijkstra's algorithm
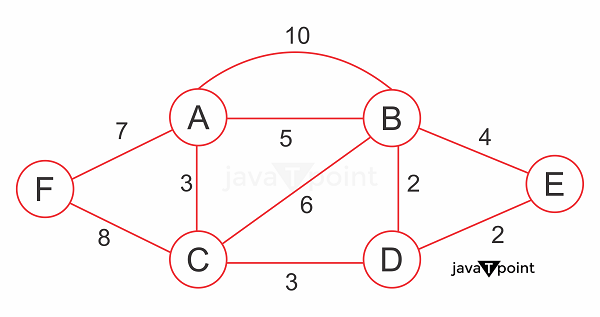
Here is a C program for Dijkstra's algorithm to find the shortest path between two nodes in a graph. The program uses an adjacency matrix to describe the graph and a priority order to store the nodes and their distances. It also includes comments that explain each step of the algorithm.
Sample Code
#include <stdio.h>
#include <limits.h>
// Number of vertices in the graph
#define V 6
// Function to find the vertex with minimum distance value
int minDistance(int dist[], int visited[])
{
int min = INT_MAX, min_index;
for (int v = 0; v < V; v++)
if (visited[v] == 0 && dist[v] <= min)
min = dist[v], min_index = v;
return min_index;
}
// Function to print the final shortest distance array
void printSolution(int dist[])
{
printf("Vertex Distance from Source\n");
for (int i = 0; i < V; i++)
printf("%d \t\t %d\n", i, dist[i]);
}
// Function to implement Dijkstra's algorithm
void dijkstra(int graph[V][V], int src)
{
int dist[V]; // The output array. dist[i] will hold the shortest distance from src to i
int visited[V]; // visited[i] will be 1 if vertex i is included in the shortest path tree or shortest distance from src to i is finalized
for (int i = 0; i < V; i++)
dist[i] = INT_MAX, visited[i] = 0;
dist[src] = 0; // Distance of source vertex from itself is always 0
for (int count = 0; count < V - 1; count++) {
// Pick the minimum distance vertex from the set of vertices not yet processed.
int u = minDistance(dist, visited);
visited[u] = 1; // Mark the picked vertex as processed
// Update dist[v] only if it is not in visited, there is an edge from u to v, and the total weight of path from src to v through u is smaller than current value of dist[v]
for (int v = 0; v < V; v++)
if (!visited[v] && graph[u][v] && dist[u] != INT_MAX && dist[u] + graph[u][v] < dist[v])
dist[v] = dist[u] + graph[u][v];
}
// Print the final shortest distance array
printSolution(dist);
}
int main()
{
int graph[V][V] = {
{0, 4, 0, 3, 0, 0},
{4, 0, 2, 5, 0, 0},
{0, 2, 0, 0, 1, 0},
{3, 5, 0, 0, 7, 0},
{0, 0, 1, 7, 0, 6},
{0, 0, 0, 0, 6, 0}
};
dijkstra(graph, 0);
return 0;
}
Sample Output:
Vertex Distance from Source
0 0
1 4
2 6
3 3
4 7
5 13
The above program finds the shortest path from point 0 to all other points on the given graph. The result shows the shortest distance from the origin (0) to each vertex of the graph.
Applications of Dijkstra's Algorithm
Dijkstra's algorithm has a wide range of applications in computing, including:
- Network Routing:The algorithm is often used in computer network routing algorithms where it is used to find the shortest path between two network points.
- Transportation networks: Dijkstra's algorithm can find the shortest path between two locations on a map, making it useful for navigation systems and logistics. Game development: The algorithm can find the shortest path between two points in the game world, making it useful for character movement and pathfinding.
- Social networks: Dijkstra's algorithm can be used to find the shortest path between two people in a social network based on the strength of their ties.
- DNA Sequencing: In bioinformatics, an algorithm is used to find the shortest path between two DNA sequences, which helps identify their similarities and differences.
- Resource allocation: Dijkstra's algorithm can be used to find the most efficient way to allocate resources in a system, such as allocating memory or processing time to different tasks. Dijkstra's algorithm is a fundamental tool in computer science with many practical applications in many fields.
Advantages of Dijkstra's Algorithm
Dijkstra's algorithm has several advantages, including:
- Efficiency: Dijkstra's algorithm is an efficient algorithm that can find the shortest path between two nodes in a graph with time complexity O(E VlogV), where E is the number of edges and V is the number of vertices. This makes it suitable for large graphics.
- Accuracy: Dijkstra's algorithm will surely find the shortest path between two nodes in a graph as long as the graph has non-negative edge weights.
- Versatility: Dijkstra's algorithm can be used in many applications, including network routing, transportation networks, social networks, and game development.
- Easy to understand and implement: Dijkstra's algorithm is a simple and straightforward algorithm that is easy to understand and implement, even for beginners in computer science.
- Optimality: Dijkstra's algorithm is an optimal algorithm in the sense that it always finds the shortest path between two nodes in the graph. It also provides a way to reconstruct the shortest path itself, which can be useful in many applications.
Overall, Dijkstra's algorithm is a versatile and powerful algorithm that is widely used in various fields of computer science, making it an essential tool for many applications.
Disadvantages of Dijkstra's Algorithm
Dijkstra's algorithm is famous for finding the shortest path between two nodes in a graph. However, like any algorithm, it has some limitations and drawbacks. Here are some disadvantages of Dijkstra's algorithm:
- Inefficient on dense graphs: Dijkstra's algorithm is designed to work well on sparse graphs where the number of edges is much less than the number of nodes. The algorithm can become inefficient and slow for dense graphs with many edges.
- Limited to non-negative weights: Dijkstra's algorithm can only be used on graphs with non-negative weights. If the graph has negative weights, the algorithm may produce incorrect results.
- Greedy Approach: Dijkstra's algorithm is a greedy algorithm, making a locally optimal choice at each step. However, this approach only sometimes leads to a globally optimal solution.
- Require a complete graph: Dijkstra's algorithm assumes that the graph is complete, meaning a path exists between each pair of nodes. If the graph is imperfect, the algorithm may not find a solution.
- It cannot handle graphs containing cycles: Dijkstra's algorithm assumes that the graph is acyclic, i.e., there are no cycles. If there are periods in the graph, the algorithm can get stuck in an infinite loop.
- Memory requirements: Dijkstra's algorithm requires a priority order to store nodes and their distances. For large graphics, this can require a lot of memory.
- Needs to handle dynamic graphs better: Dijkstra's algorithm is unsuitable for dynamically changing graphs because it requires recomputing the entire graph each time.
Although Dijkstra's algorithm is a helpful tool for finding the shortest path in a graph, it has certain limitations and may only sometimes be the best choice for certain types of problems or graphs.
The complexity of Dijkstra's algorithm
The time complexity of Dijkstra's algorithm depends on the data structure used to implement the priority queue. The most common data structure used for this purpose is binary, which gives a time complexity of O((E V) log V), where E is the number of edges and V is the number of vertices in the graph. However, using a Fibonacci seed data structure can improve the time complexity to O(E V log V), which is asymptotically faster than a binary heap.
Regarding space complexity, Dijkstra's algorithm requires O(V) space to store the distance table and O(V) space to store the logical table used to keep track of visited vertices. Additionally, the priority queue requires O(V) space using a binary heap or O(E V) space using a Fibonacci heap. In general, Dijkstra's algorithm has a time complexity of O ((E V) log V) or O (E V log V) and a space complexity of O (V) or O (E V), depending on the choice of data structure used in the priority order.
Inference of Dijkstra's Algorithm
In summary, Dijkstra's algorithm is popular and widely used for finding the shortest path between nodes in a graph. This is particularly useful in applications where finding the shortest path is critical, such as transport networks, communication networks, and computer networks. The algorithm works by maintaining the order of priority vertices that have not yet been processed and iteratively processing the vertex with the smallest distance from the source node until all vertices have been processed. During each iteration, the algorithm updates the distance values of neighboring points and selects the vertex with the smallest distance to be processed next. The time complexity of Dijkstra's algorithm is O((E V) log V) or O(E V log V), depending on the priority queue data structure used. The complexity of this space is also O(V) or O(E V), depending on the data structure used. In general, Dijkstra's algorithm is valuable and efficient for finding the shortest paths in a graph and has a wide range of applications in various fields.