Mutex in Operating System
A mutex is a synchronization object that provides mutual exclusion to a shared resource. A shared resource is any resource that can be accessed by multiple threads or processes, such as a variable, data structure, or file. The purpose of a mutex is to ensure that only one thread or process can access the shared resource at any given time.
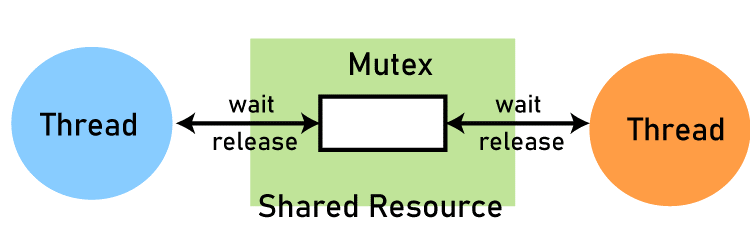
A mutex has two states: locked and unlocked. When a thread or process wants to access the shared resource, it must first acquire the mutex. If the mutex is unlocked, the thread or process can acquire the mutex and access the shared resource. If the mutex is locked, the thread or process must wait until the mutex is unlocked before it can acquire it and access the shared resource. Waiting threads or processes are blocked, which means they are not executing and are put on hold by the operating system.
Once a thread or process has acquired the mutex, it can access the shared resource. While the mutex is locked, no other thread or process can access the shared resource until the mutex is released. When the thread or process has finished accessing the shared resource, it must release the mutex, which allows other threads or processes to acquire it and access the shared resource.
The process of acquiring and releasing a mutex is atomic, which means it is indivisible and cannot be interrupted by other threads or processes. This ensures that only one thread or process can acquire the mutex at a time, preventing race conditions and ensuring the correctness of the program.
Mutexes are typically implemented using hardware or software mechanisms provided by the operating system, such as semaphores, spin locks, or critical sections. The choice of the mechanism depends on the specific requirements of the program and the performance characteristics of the system.
Some common uses of mutexes in operating systems include:
- Protecting shared data structures: Mutexes can be used to protect shared data structures, such as lists, queues, or tables, from simultaneous access by multiple threads or processes. By using a mutex, only one thread or process can access the data structure at a time, ensuring that data is read and modified consistently.
- Implementing critical sections: Mutexes can be used to implement critical sections, which are sections of code that must be executed atomically. By using a mutex, only one thread or process can execute the critical section at a time, ensuring that the code is executed consistently and correctly.
In summary, mutexes are an essential synchronization primitive in operating systems and multi-threaded programming. They provide mutual exclusion to shared resources, prevent race conditions, and ensure the correctness of the program.
Scope of Mutex in Operating System
- The scope of a mutex in an operating system refers to the area of the system in which the mutex can be accessed and used. The scope of a mutex can be global or local.
- A global mutex is a mutex that is accessible from any thread or process in the system. Global mutexes are typically used to synchronize access to system-wide resources, such as shared files, network sockets, or system services.
- Global mutexes are created and managed by the operating system and are identified by a system-wide unique name or handle.
- Global mutexes are useful for coordinating access to system-wide resources that can be accessed by multiple threads or processes, such as shared files or network sockets.
- They provide a reliable and efficient way to prevent race conditions and ensure the correctness of the program.
- A local mutex is a mutex that is accessible only within a specific thread or process. Local mutexes are typically used to synchronize access to local resources, such as variables, data structures, or functions.
- Local mutexes are created and managed by the application code and are identified by a local variable or pointer.
- The scope of a mutex also determines its visibility and accessibility. A global mutex can be accessed by any thread or process in the system, regardless of its location or ownership.
- A local mutex can be accessed only by the thread or process that owns it, and its visibility is limited to the local context.
- In general, the scope of a mutex depends on the specific requirements of the program and the design of the system.
- Global mutexes are useful for coordinating access to shared resources across different threads or processes, but they can introduce performance overhead and potential contention.
- Local mutexes are more lightweight and efficient, but they require careful management and may not be suitable for complex synchronization scenarios.
In summary, the scope of a mutex in an operating system determines its visibility and accessibility, and it depends on the specific requirements of the program and the design of the system. Global mutexes are used for system-wide synchronization, while local mutexes are used for local synchronization within a thread or process.
Advantages of Mutex in OS
The advantages of mutexes in operating systems are:
- Mutual exclusion: Mutexes provide mutual exclusion to shared resources, allowing only one thread or process to access the resource at a time. This prevents race conditions and ensures the correctness of the program.
- Synchronization: Mutexes provide synchronization between threads or processes, allowing them to coordinate their access to shared resources and avoid conflicts or data corruption.
- Priority inversion prevention: Mutexes provide priority inversion prevention, which ensures that high-priority threads or processes are not blocked by lower-priority threads or processes that hold the mutex.
- Deadlock prevention: Mutexes can be used to prevent deadlocks in complex synchronization scenarios by implementing a strict acquisition protocol that avoids circular wait conditions.
- Efficient: Mutexes are efficient synchronization primitives, typically implemented using atomic operations or lightweight kernel synchronization mechanisms. They provide low overhead and high performance compared to other synchronization mechanisms.
- Flexibility: Mutexes can be used in a variety of synchronization scenarios, from simple critical sections to complex multi-threaded programs and distributed systems. They are versatile synchronization primitives that can be adapted to different requirements and designs.
Disadvantages of Mutex in OS
Although mutexes are a powerful synchronization mechanism in operating systems, there are also some disadvantages to their use:
- Blocking: Mutexes can cause blocking, which occurs when a thread or process is suspended while waiting to acquire a mutex. This can lead to performance issues if the mutex is held for a long time or if multiple threads or processes are competing for the same mutex.
- Deadlocks: Mutexes can also cause deadlocks, which occur when two or more threads or processes are waiting for each other to release a mutex. This can result in a situation where all threads or processes are blocked and cannot make progress.
- Overhead: Mutexes can introduce overhead, which occurs when the system calls or context switches are required to acquire or release a mutex. This can result in increased CPU utilization and decreased performance, especially in high-concurrency scenarios.
- Priority inversion: Mutexes can also cause priority inversion, which occurs when a low-priority thread or process holds a mutex that is needed by a high-priority thread or process. This can result in a situation where the high-priority thread or process is blocked by the low-priority thread or process, leading to reduced responsiveness or even system failure.
- Scope: Mutexes have a limited scope, typically limited to a single process or a single shared resource. This can result in more complex synchronization scenarios when multiple processes or resources need to be coordinated.
Applications of Mutex in OS
Mutexes are widely used in various applications, such as:
- Multithreaded programming: Mutexes are used to synchronize access to shared data structures in multi-threaded programs. By using mutexes, multiple threads can safely access the same data structures without causing race conditions or inconsistent results.
- Process synchronization: Mutexes are used to synchronize access to system resources, such as shared memory or files, between multiple processes. By using mutexes, multiple processes can safely access the same resources without causing conflicts or data corruption.
- Deadlock prevention: Mutexes are used to prevent deadlocks in complex synchronization scenarios, such as resource allocation or scheduling. By using mutexes, multiple threads or processes can coordinate their actions and avoid deadlocks.
- Real-time systems: Mutexes are used in real-time systems to provide timing guarantees and prevent priority inversion. By using mutexes, real-time tasks can be scheduled and executed with predictable timing behavior.
- Distributed systems: Mutexes are used in distributed systems to coordinate access to shared resources across multiple nodes or processes. By using mutexes, distributed systems can maintain consistency and prevent conflicts between different nodes or processes.