Real-time Operating System
In this essay, we will thoroughly understand the real-time operating system.
Real-Time Operating System: What do you mean?
For any task to be completed, a real-time operating system (RTOS), a special-purpose operating system used in computers, must meet rigorous time requirements. It is mostly utilized in systems where the output of calculations is used to modify a process while running. A sensor to monitor the event is used to provide information about external events to the computer whenever they happen. The operating system interprets the signal from the sensor as an interrupt. When an interrupt occurs, the operating system starts a particular process or group of processes to handle it.
These include telephone switching systems, industrial control, and real-time simulations. Processing must adhere to the constraints of this type of system. If this keeps happening, the system will malfunction.
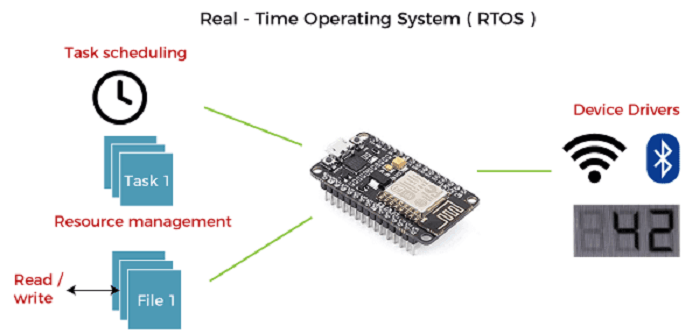
Unless a higher priority interrupt happens while this process runs, it continues without interruption. While lower-priority interruptions should be retained in a buffer to be handled later, the interrupt with the highest priority must be permitted to start the process. In a system like this, interruption control is crucial.
Real-time operating systems use special-purpose operating systems since regular operating systems cannot deliver the required performance.
Real-time operating systems include, among others,
- MTS.
- Lynx.
- QNX.
- And VxWorks.
Applications of the Real-Time Operating System (RTOS):
RTOS is utilized in real-time applications, which have strict time constraints.
- In the Radar device, real-time running structures are utilized.
- Missile guidance uses real-time running structures.
- Online inventory trade uses real-time running structures.
- The mobile phone switching device uses real-time running mechanisms.
- Air site visitors control structures using real-time running structures.
- Medical imaging systems employ real-time running structures.
- The Fuel injection device uses real-time running structures.
- The Traffic modification device uses real-time running structures.
- Autopilot trip simulators use real-time running structures.
Types of real-time operating systems
The three categories of RTOS systems are as follows:
Hard real-time operating systems
Operating systems that guarantee hard real-time: These systems ensure that crucial processes are accomplished in a certain amount of time.
For instance, an automobile body is welded by a robot. It is a difficult real-time system that demands complete robot welding of the automobile barely on time because the car must be sold before the robot welds too early or too late.
All crucial actions in Hard RTOS must be finished by the deadline or within the allotted time frame.
As an illustration, consider the airbags and handle that automobile manufacturers give for the driver's seat. The airbags expand when the driver hits the brakes at that precise moment, preventing the driver's head from striking the handle.
The system must ensure that an instruction to sell a certain share is executed within a specified window. Otherwise, a sudden decline in the market might result in the trader suffering a significant loss.
Soft real-time operating system.
Real-time systems come across explicit, programmer-defined, and regulated procedures. For instance, digital audio systems, multimedia systems, etc. Concerning managing a single external event, a different method is modified. When the associated event occurs, which is alerted by an interrupt, the procedure is initiated.
By planning processes for autonomous execution, multitasking operations are made possible. Each process is given a level of priority based on the relative significance of the event it supports. Real-time systems employ a scheduling method known as priority-based pre-emptive scheduling.
Through the use of the operating system, Soft RTOS accommodates a few delays. It's possible under this type of RTOS that a certain job has a deadline that must be met, but a brief delay is allowed. Cut-off dates are therefore handled gently by this type of RTOS.
This kind of technology, for instance, is utilized in livestock price quote systems and online transaction systems.
Firm real-time operating system
This kind of RTOS must also adhere to deadlines. Despite its little impact, missing a deadline might lead to unforeseen events, such as a product quality decline. Multimedia software is an illustration.
Additionally, RTOS in businesses must adhere to deadlines. Although the absence of a deadline might not significantly impact, it could have unintended consequences like a significant reduction in a product's quality.
This technology, for instance, is utilized in several multimedia applications.
Advantages of real-time operating system
The following are some advantages of real-time operating systems:
- Real-time operating systems make designing, creating, and running real-time applications simple.
- Because the real-time working structures are so small, they take up substantially less memory.
- The highest possible device and system usage in a real-time operating system.
- Give running programs more priority while giving queued apps less attention.
- Since RTOS programs are compact, they may be used in embedded systems for transportation and other applications.
- These kinds of systems don't make mistakes.
- These systems are the best at managing memory allocation.
- Maximum consumption - Fullest possible use of tools and systems increased output from all the resources.
- Application Focus - Give running apps more attention and queued applications less so.
- Error Free - These kinds of systems don't make mistakes.
Disadvantages of real-time operating system
The following are some drawbacks of real-time operating systems: o Real-time operating systems have complex design concepts and are highly expensive to construct.
- Real-time operating systems can eat up important CPU cycles and are quite sophisticated.
- Limited Tasks - Only a small number of tasks are active at once, and they focus primarily on a small number of applications to reduce mistakes.
- Use many system resources - Sometimes, system resources are expensive and subpar.
- Thread Priority - Setting thread priority is not recommended since these systems are not particularly effective at switching tasks.
- Minimal Task Switching - RTOS uses a minimum amount of task switching.
- Real-time operating systems can eat up important CPU cycles and are quite sophisticated.
- Limited Tasks - Only a small number of tasks are active at once, and they focus primarily on a small number of applications to reduce mistakes.
- Use many system resources - Sometimes, system resources are expensive and subpar.
- Thread Priority - Setting thread priority is not.