What is BSR Mode?
The term BSR stands for Bit set/reset. This is one of the operational modes in the 8255 programmable input/output device. The 8255 is also called 8255 PPI, where PPI stands for Programmable Peripheral Interface. This is developed by Intel Corporation in the 1970s. The 8255 was widely used and became a fast-growing device that provides exceptional programming capabilities and handles the I/O operations very easily in numerous systems and programs at the same time, which made this a more reliable and fast-growing device at that time.
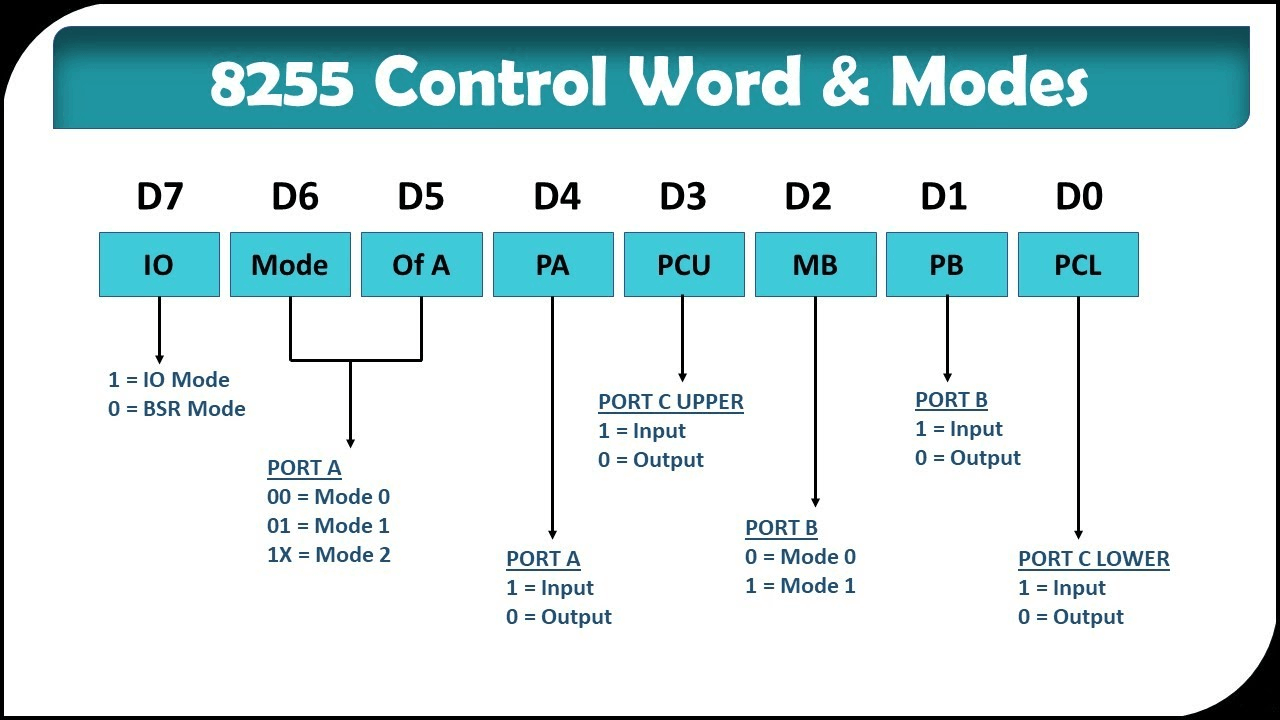
The 8255 chips have set a standard in the industry for handling the input/output operations of the system efficiently. This is because the chips have three various operating modes; these are for faster computation speeds. The chip offers three 8-bit ports named as port A, port B, and port C. Each of these ports is for handling the input/output operations efficiently. As discussed above, the three operational modes are Mode 0, Mode 1, and Mode 2; these modes are used to provide support for the ports for the input/output functions.
The 8255 chips have control over the process and have status registers that are utilized for the configuration and monitoring of the operations performed by the chip. These registers play a significant role in allocating the modes and controlling the operations, whether to read or write the data to and from the ports given. These 8255 chips are used in vast applications where the execution of multiple input/output operations is required simultaneously.
The operation modes in 8255 chips
- Bit set-reset mode (BSR mode)
- Input/Output mode (I/O mode)
These operating modes provide more power to the chips. As there are three modes in the 8255 chips, each mode is defined as follows. Mode 0 can be defined as the input/output mod, which is the fundamental mode. Mode 1 has the strobe input/output mode. This mode is similar to Mode 0, which shares standard functionalities, including some more like control signals.
Mode 2 is the bidirectional mode. In this mode, the ports A and B are modified to perform the bidirectional tasks. The ports A and B are modified as bidirectional input/output ports, whereas the port C is modified as the control port for other operations to get implemented. These modes can also be altered with the help of programming the multiple registers that exist in the system, which allows for more considerable flexibility and efficiency in the execution.
The 8255 peripheral device provides the two different operating modes to provide the flexibility to the device and provide a better interface with various input/output devices. The use of different modes for operating allows the efficiency and more access to customization of the program.
Let us discuss the operating modes in detail:
Bit set-reset mode (BSR mode)
This is one of the operational modes used in the 8255 peripheral device, which helps provide more functionality to the system. This mode is used to set or reset the data/bits of the C port exclusively. The most significant bit is D7 in the control register 0. This mode affects only one bit of port cat the instance due to the user setting the bits. It will remain like that until there are any changes from the user side.
- Mode 0 - Simple input/output: Port A, port B, and Port C will work as an input function or as an output function. The output is attached, but the inputs are not attached. This has an interrupting handling capacity.
- Mode 1 - Strobed input/output: In this operating mode, either ports A or port B are working ports, and C port bits are utilized to produce handshaking. The outputs, along with the inputs, are attached. Before the actual bits transfer, there will be a transmission of the signal to match the frequency of the CPU.
- Mode 2 – Bidirectional input/output: This mode works only with Port A, and the B port can either be in Mode 0 or Mode 1, and the Port C data will be used for handshaking. The outputs, along with the inputs, are attached here.
When the 8255 devices are reset, this will clear the register contents and thereby making all the ports to the primary input mode. The usage of the Bit set-reset mode provides more flexibility and various ways to handle the input/output operations in the system. It provides greater efficiency in using the suitable control register and allows for dealing with more computational tasks.
This is implemented at less cost making it the best-opted option for the industry to perform the tasks. The 8255 devices also provide compatibility with the system by providing access to a wide range of operations and can be easily applied with various operating systems.
But this also comes with some disadvantages, which include limited functionality because to manage multiple and parallel tasks at the same time, it will be difficult for it to manage the tasks and the burden on the device. Limited data transfer rates are because to manage the simultaneous operations that it should manage and a limited number of ports, which are only 3 in the 8255 devices. Along with the disadvantages, as mentioned earlier, there is also a problem with the complexity of the program to work on.